





MJOPTC Objektiv průmyslové kamery 2,8 mm MJ880810 s pevným ohniskem
Pole objektivu průmyslové kamery
| Sériové číslo | Položka | Hodnota |
| 1 | EFL | 2.8 |
| 2 | F/NE. | 2.4 |
| 3 | FOV | 170° |
| 4 | TTL | 16.2 |
| 5 | Velikost snímače | 1/3” 1/2,9” |
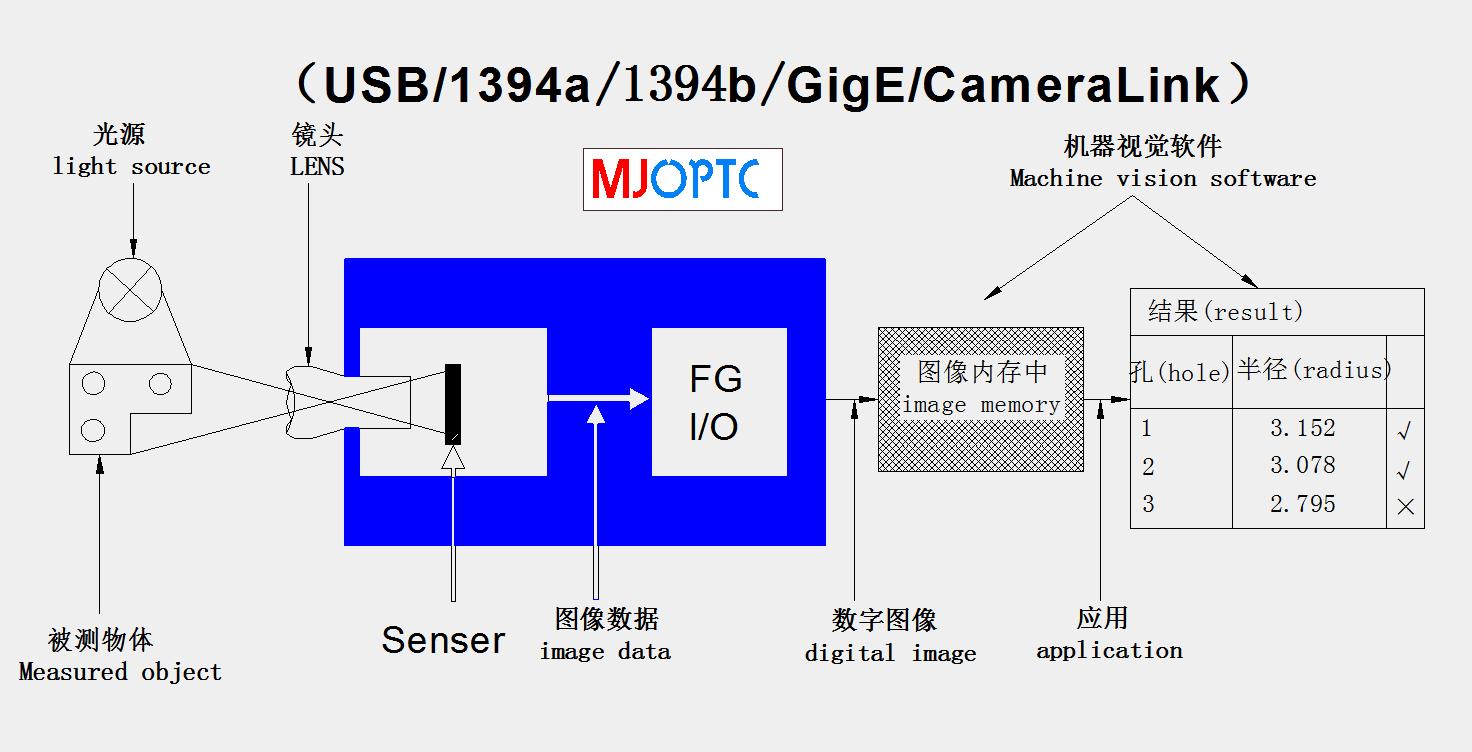
Průmyslové kamery se dělí na analogové kamery a digitální kamery podle formátu výstupního obrazového signálu.
Dřívější průmyslové kamery většinou používaly standardní analogový výstup, jako je PAL/NTSC/CCIR/ EIA-170, a některé produkty používaly nestandardní analogový výstup.S rozvojem a popularizací technologie digitálního rozhraní stále více průmyslových digitálních kamer nahrazuje tradiční analogové kamery v různých systémech strojového vidění.Navíc je signál digitálního fotoaparátu méně rušen šumem, takže dynamický rozsah digitálního fotoaparátu je vysoký a kvalita obrazu je lepší.
Velký cílový povrch 8 megapixelů širokoúhlý průmyslový sledovací objektiv, širokopásmová antireflexní vrstva, zlepšuje výkon propustnosti světla, 3 miliony pixelů s vysokou přesností zobrazování, vysoké rozlišení, velká hloubka ostrosti, kompaktní velikost, malá velikost, dobrá odolnost proti nárazům.
Požadavky na objektiv průmyslové kamery pro strojové vidění:
Různá průmyslová odvětví mají různé možnosti výběru čoček pro strojové vidění.Strojové vidění dodává průmyslovým řídicím systémům nový vizuální rozměr, může poskytnout velikost, polohu a orientaci dílů na montážní lince a správný výběr čoček je velmi důležitý, aby strojové vidění hrálo svou náležitou roli, takže více robotů výrobci se rozhodnou prohloubit spolupráci s výrobci objektivů.MJOPTC může přizpůsobit, zkoumat a vyvíjet související čočky zraku nebo poskytovat spolupráci OEM/ODM podle potřeb zákazníka.
Strojové vidění hraje stále důležitější roli při řízení průmyslových procesů, zejména v oblastech, jako je navádění robotů, rozpoznávání objektů a zajišťování kvality.Současné nejmodernější systémy vidění přesahují tyto základní funkce, jako je identifikace dílů a jejich orientace, a poskytují informace pro následné funkce, jako je přesun objektů z jednoho místa na druhé.Například v automobilových výrobních a kontrolních linkách se dopravní pásy často používají jako referenční.Robot zde plní dva úkoly: rozpoznávání a teleportaci.
Optické ovládání je velmi důležité ve většině aplikací strojového vidění.Systémy robotického vidění také vyžadují extrémně vysokou opakovatelnost, takže pro zajištění čistého obrazu je nutné snížit jitter.V této době hraje rozhodující roli optická čočka s vysokým rozlišením a vysokou spolehlivostí.





