





MJOPTC Kiinteä polttovälinen 2,8 mm MJ880810 HD teollisuuskameran linssi
Teollisuuden kameran linssikenttä
| Sarjanumero | Tuote | Arvo |
| 1 | EFL | 2.8 |
| 2 | F/EI. | 2.4 |
| 3 | FOV | 170° |
| 4 | TTL | 16.2 |
| 5 | Anturin koko | 1/3" 1/2,9" |
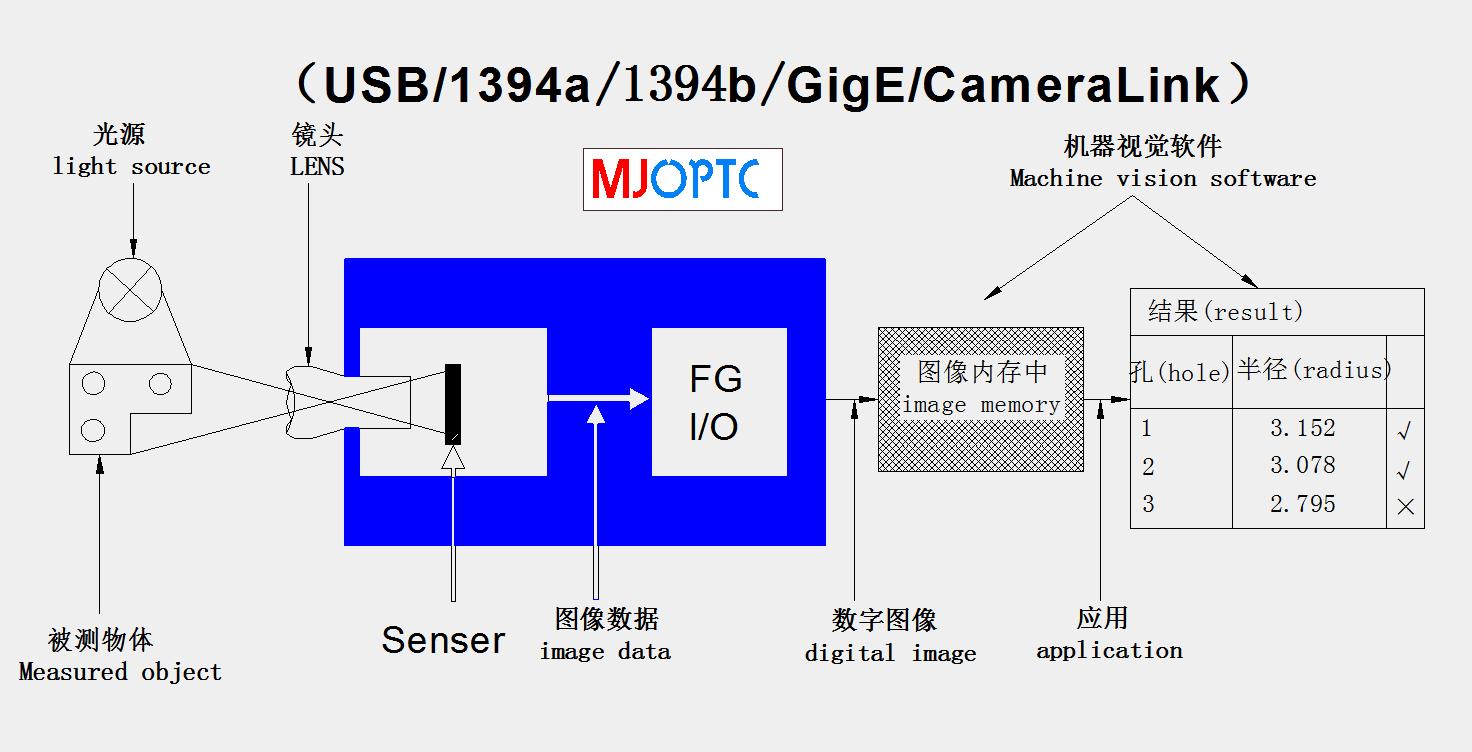
Teollisuuskamerat jaetaan analogisiin kameroihin ja digitaalikameroihin lähtökuvasignaalin muodon mukaan.
Varhaiset teollisuuskamerat käyttivät enimmäkseen standardia analogista lähtöä, kuten PAL/NTSC/CCIR/EIA-170, ja joissakin tuotteissa käytettiin ei-standardia analogista lähtöä.Digitaalisen rajapintatekniikan kehittyessä ja yleistyessä yhä useammat teolliset digitaalikamerat korvaavat perinteiset analogiset kamerat erilaisissa konenäköjärjestelmissä.Lisäksi digikameran signaali häiritsee vähemmän kohinaa, joten digitaalikameran dynaaminen alue on korkea ja kuvanlaatu parempi.
Suuri kohdepinta 8 megapikselin laajakulmainen teollisuusvalvontalinssi, laajakaistainen heijastuksenestopinnoite, parantaa valonläpäisykykyä, 3 miljoonan pikselin korkean tarkkuuden kuvaus, korkea resoluutio, suuri syväterävyys, kompakti koko, pieni koko, hyvä iskunkesto.
Teollisuuskameran konenäön linssin vaatimukset:
Eri toimialoilla on erilaisia vaihtoehtoja konenäkölinsseille.Konenäkö tuo uuden visuaalisen ulottuvuuden teollisiin ohjausjärjestelmiin, se voi tarjota osien koon, sijainnin ja suunnan kokoonpanolinjalla, ja oikea linssin valinta on erittäin tärkeää, jotta konenäkö voi täyttää sille kuuluvan roolin, joten enemmän robottia valmistajat päättävät tehdä syvällistä yhteistyötä linssien valmistajien kanssa.MJOPTC voi räätälöidä, tutkia ja kehittää niihin liittyviä näkölinssejä tai tarjota OEM/ODM-yhteistyötä asiakkaiden tarpeiden mukaan.
Konenäkö on yhä tärkeämpi rooli teollisten prosessien ohjauksessa, erityisesti sellaisilla alueilla kuin robotin ohjaus, esineiden tunnistus ja laadunvarmistus.Nykyiset näköjärjestelmät ylittävät perustoiminnot, kuten osien tunnistamisen ja suuntaamisen, tarjotakseen tietoa myöhempiä toimintoja, kuten esineiden siirtämistä paikasta toiseen, varten.Esimerkiksi autojen tuotanto- ja katsastuslinjoilla kuljetinhihnoja käytetään usein referenssinä.Tässä robotti suorittaa kaksi tehtävää: tunnistus ja teleportaatio.
Optinen ohjaus on erittäin tärkeä useimmissa konenäkösovelluksissa.Robottinäköjärjestelmät vaativat myös erittäin suurta toistettavuutta, joten värinää on vähennettävä selkeän kuvan saamiseksi.Tällä hetkellä erittäin luotettavalla teräväpiirtonäköobjektiivilla on ratkaiseva rooli.





