





MJOPTC Fiksuoto židinio 2,8 mm MJ880810 HD pramoninės kameros objektyvas
Pramoninių fotoaparatų objektyvų laukas
| Serijos numeris | Prekė | Vertė |
| 1 | EFL | 2.8 |
| 2 | F/NO. | 2.4 |
| 3 | FOV | 170° |
| 4 | TTL | 16.2 |
| 5 | Jutiklio dydis | 1/3" 1/2,9" |
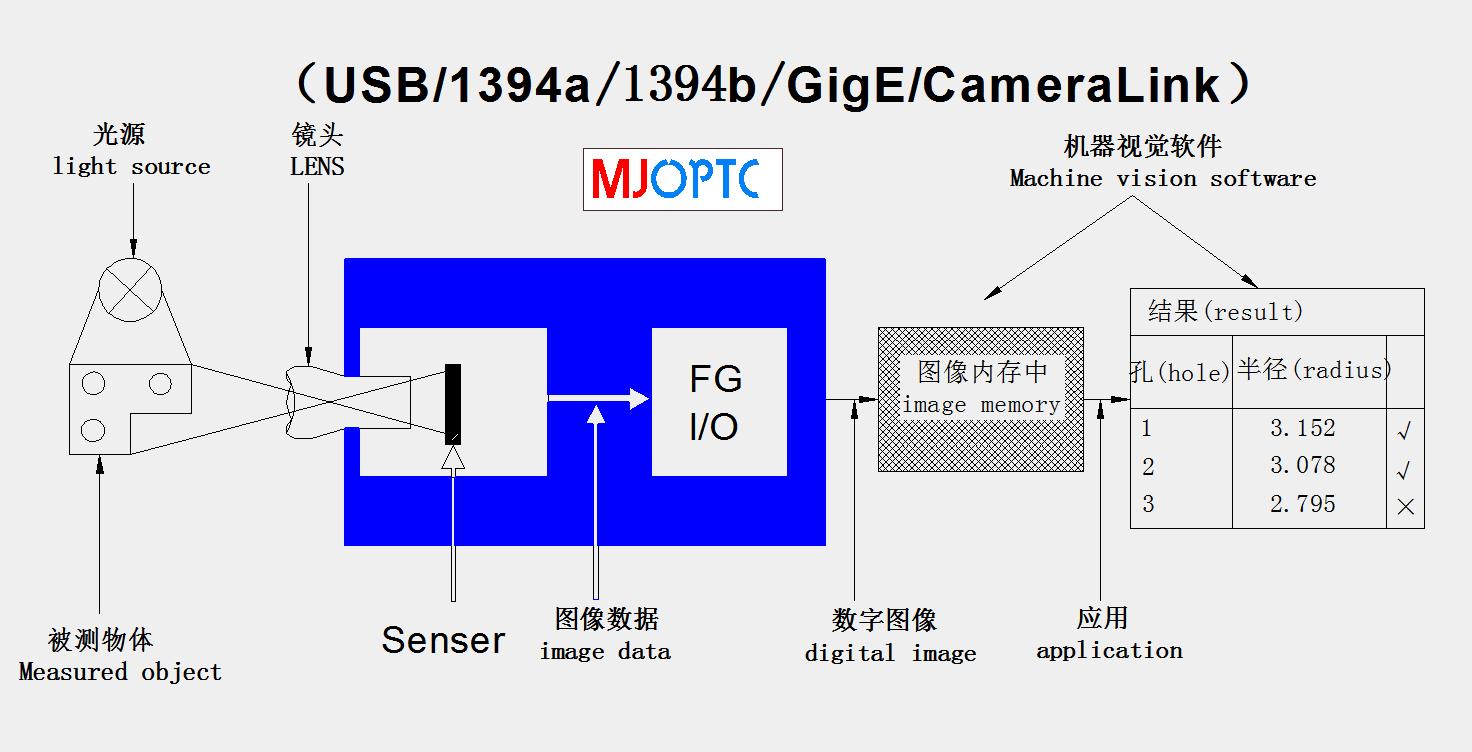
Pramoninės kameros skirstomos į analogines ir skaitmenines kameras pagal išvesties vaizdo signalo formatą.
Ankstyvosiose pramoninėse kamerose dažniausiai buvo naudojama standartinė analoginė išvestis, tokia kaip PAL/NTSC/CCIR/EIA-170, o kai kurie gaminiai naudojo nestandartinę analoginę išvestį.Tobulėjant ir populiarėjant skaitmeninės sąsajos technologijai, vis daugiau pramoninių skaitmeninių fotoaparatų pakeičia tradicines analogines kameras įvairiose mašininio matymo sistemose.Be to, skaitmeninio fotoaparato signalą mažiau trikdo triukšmas, todėl skaitmeninio fotoaparato dinaminis diapazonas yra didelis ir vaizdo kokybė geresnė.
Didelis tikslinis paviršius 8 mega pikselių plataus kampo pramoninio stebėjimo objektyvas, plačiajuostė antirefleksinė danga, pagerinantis šviesos pralaidumą, 3 milijonų pikselių didelio tikslumo vaizdas, didelė skiriamoji geba, didelis lauko gylis, kompaktiškas dydis, mažas dydis, geras atsparumas smūgiams.
Reikalavimai pramoninio fotoaparato mašininio matymo objektyvui:
Įvairios pramonės šakos turi skirtingus mašininio matymo lęšių pasirinkimus.Mašininis matymas pramoninėms valdymo sistemoms suteikia naują vizualinį matmenį, jis gali nustatyti dalių dydį, padėtį ir orientaciją surinkimo linijoje, o tinkamas objektyvo pasirinkimas yra labai svarbus, kad mašininis matymas atliktų deramą vaidmenį, todėl daugiau roboto. gamintojai nusprendžia nuodugniai bendradarbiauti su objektyvų gamintojais.MJOPTC gali pritaikyti, tirti ir kurti susijusius regėjimo lęšius arba bendradarbiauti OEM/ODM pagal klientų poreikius.
Mašinų matymas atlieka vis svarbesnį vaidmenį kontroliuojant pramonės procesus, ypač tokiose srityse kaip roboto valdymas, objektų atpažinimas ir kokybės užtikrinimas.Dabartinės moderniausios vizijos sistemos neapsiriboja pagrindinėmis funkcijomis, tokiomis kaip dalių identifikavimas ir jų orientavimas, kad pateiktų informaciją tolesnėms funkcijoms, pvz., objektų perkėlimui iš vienos vietos į kitą.Pavyzdžiui, automobilių gamybos ir tikrinimo linijose konvejerio juostos dažnai naudojamos kaip nuoroda.Čia robotas atlieka dvi užduotis: atpažinimą ir teleportaciją.
Optinis valdymas yra labai svarbus daugelyje mašininio regėjimo programų.Robotų matymo sistemoms taip pat reikalingas itin didelis pakartojamumas, todėl norint gauti aiškų vaizdą būtina sumažinti virpesį.Šiuo metu lemiamą vaidmenį atlieka aukštos raiškos vaizdo objektyvas, pasižymintis dideliu patikimumu.
SusijęsPRODUKTAI
-

MJOPTC MJ880801 EFL4.2 F1.8 1/3″ jutiklis I...
-

MJOPTC MJ8808 EFL3 F1.69 TTL22.5 QR Droid Priv...
-

MJOPTC MJ8808-25 vairuojamas PSDVR objektyvas su EFL2.9...
-

MJOPTC MJ8802 EFL1.3 F2.3 TTL14.4 360 Degree Ca...
-

MJOPTC MJ8801 EFL3.5mm 1/1.8″ jutiklis Automobilis...
-

MJOPTC MJ8809 Pramoninis fotoaparato objektyvas, skirtas EFL8.2...





